

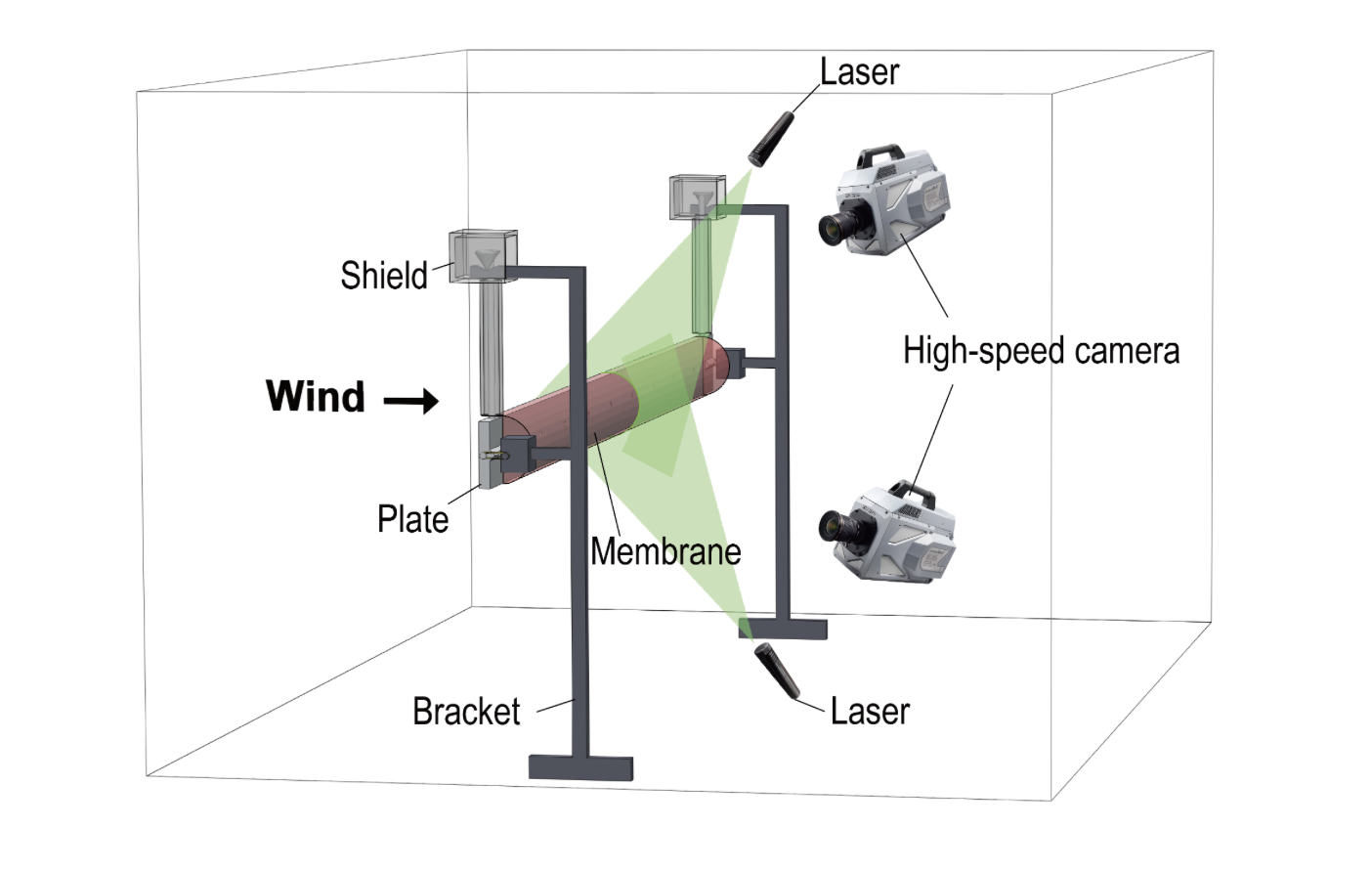
近日,WilliamHill田新亮研究小组完成了软尾减阻的三维风洞实验,并发现了高达22.2%的减阻效果。该研究成果以Drag reduction using a self-adaptive flexible ...
2024-04-08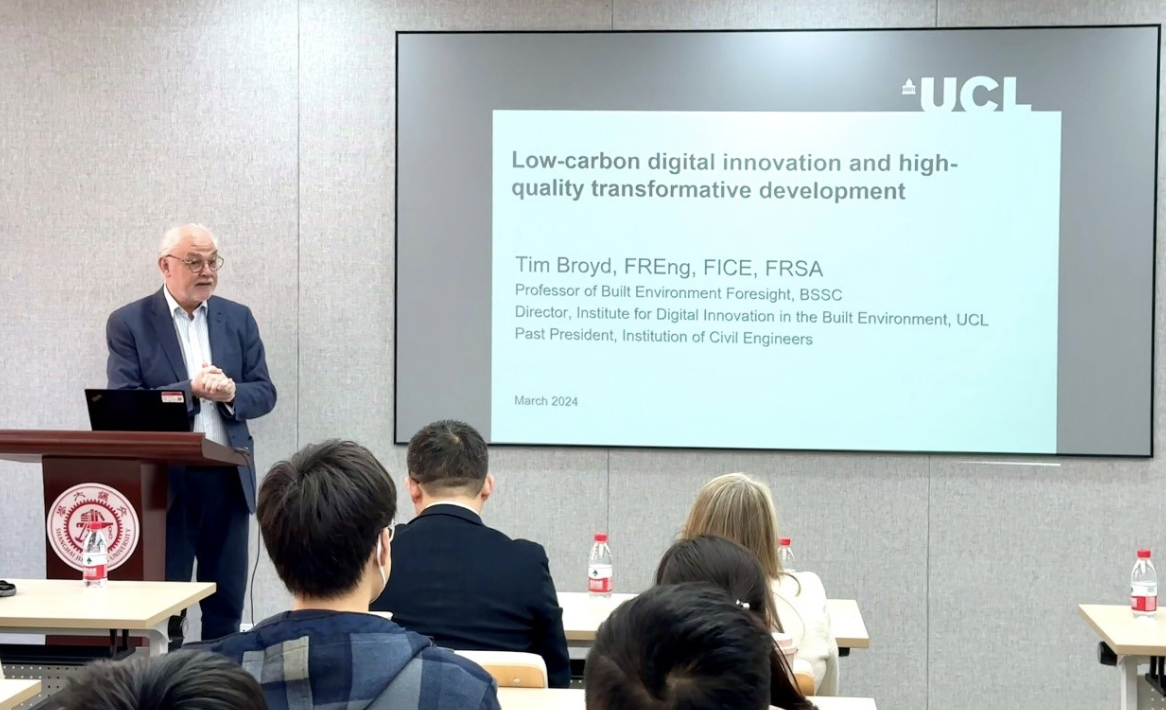
3月20日,英国皇家工程院院士、伦敦大学学院建筑环境数字创新研究所所长Tim Broyd教授应邀做客WilliamHill第六十六期智汇论坛,带来《低碳数字创新与高质量转型发展》的报告。论坛由WilliamHill副院长杨健...
2024-03-22

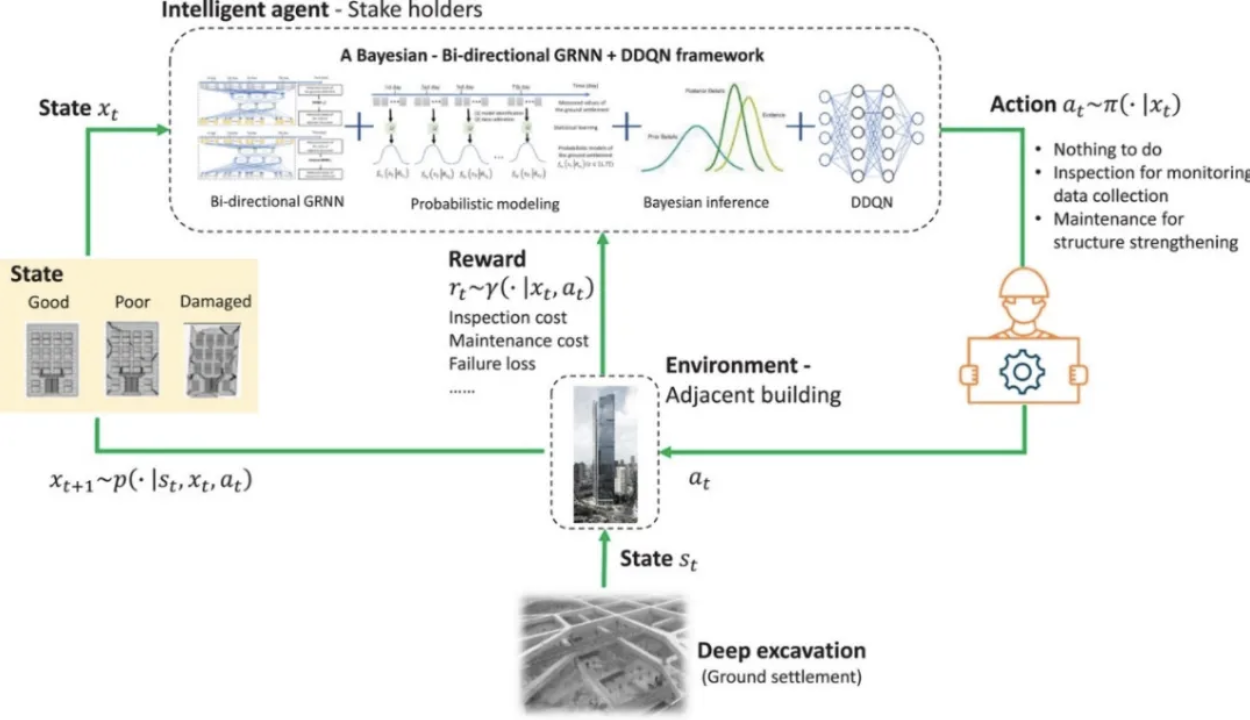

3月1日,伯明翰大学工程学院Sakdirat Kaewunruen教授应做客WilliamHill第六十五期智汇论坛,带来《人工智能驱动的多尺度数字铁路基础设施系统加速碳中和过渡》的报告。论坛由WilliamHill副院长杨...
2024-03-02

